Work Experience
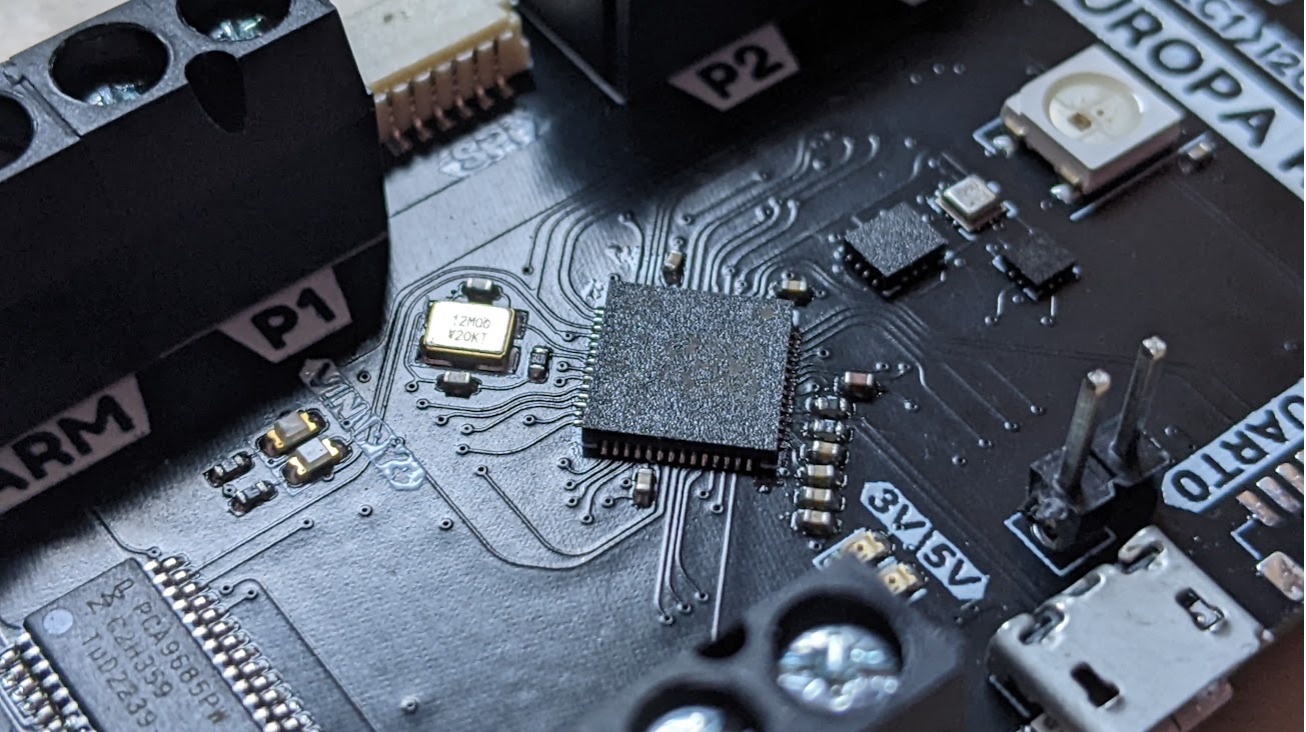
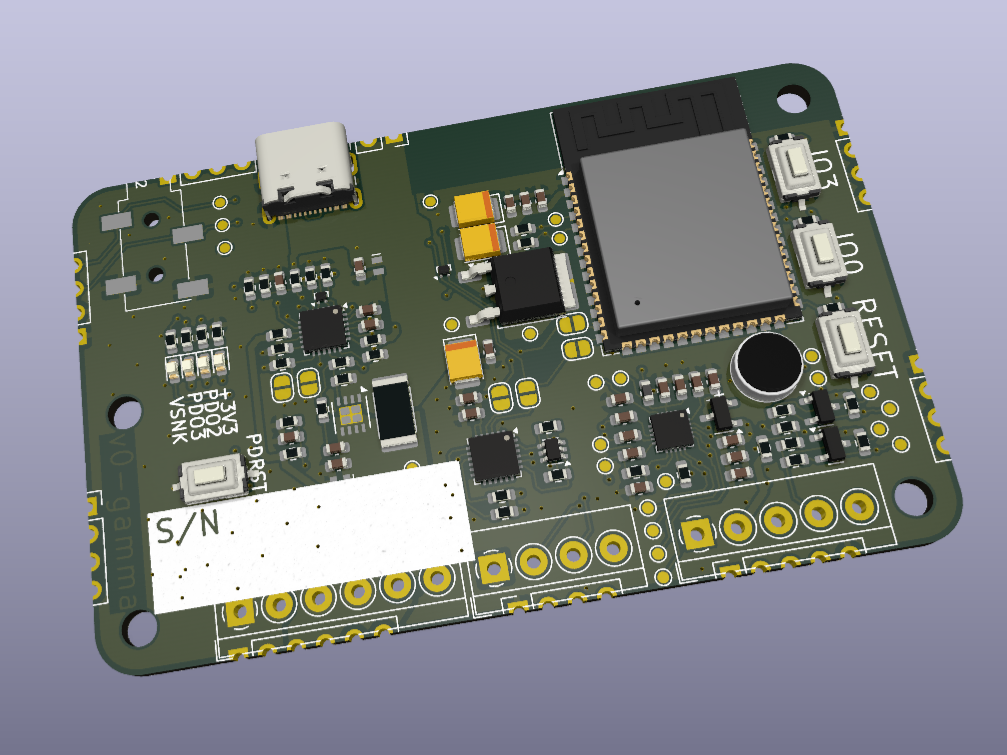
Since January 2024, I have been working as an embedded systems engineer at Custom Litt. I designed and built a bluetooth low energy (BLE) and WiFi enabled music reactive display for DJs and live performers. I programmed, tested, and deployed a real-time graphics rendering pipeline using C/C++ that outperformed the company’s previous solution by a factor of 4 in speed benchmarks. I also integrated a parallelized audio processing to enable music reactivity using fast fourier transforms. I am currently working on refining our Over The Air (OTA) update service using HTTPS and web servers implemented in C. I have played a critical role in the complete design process of Custom Litt’s Pixlpro product, starting at the conceptual design phase and leading development of firmware, hardware, and infrastructure, all the way through to deployment and production support.

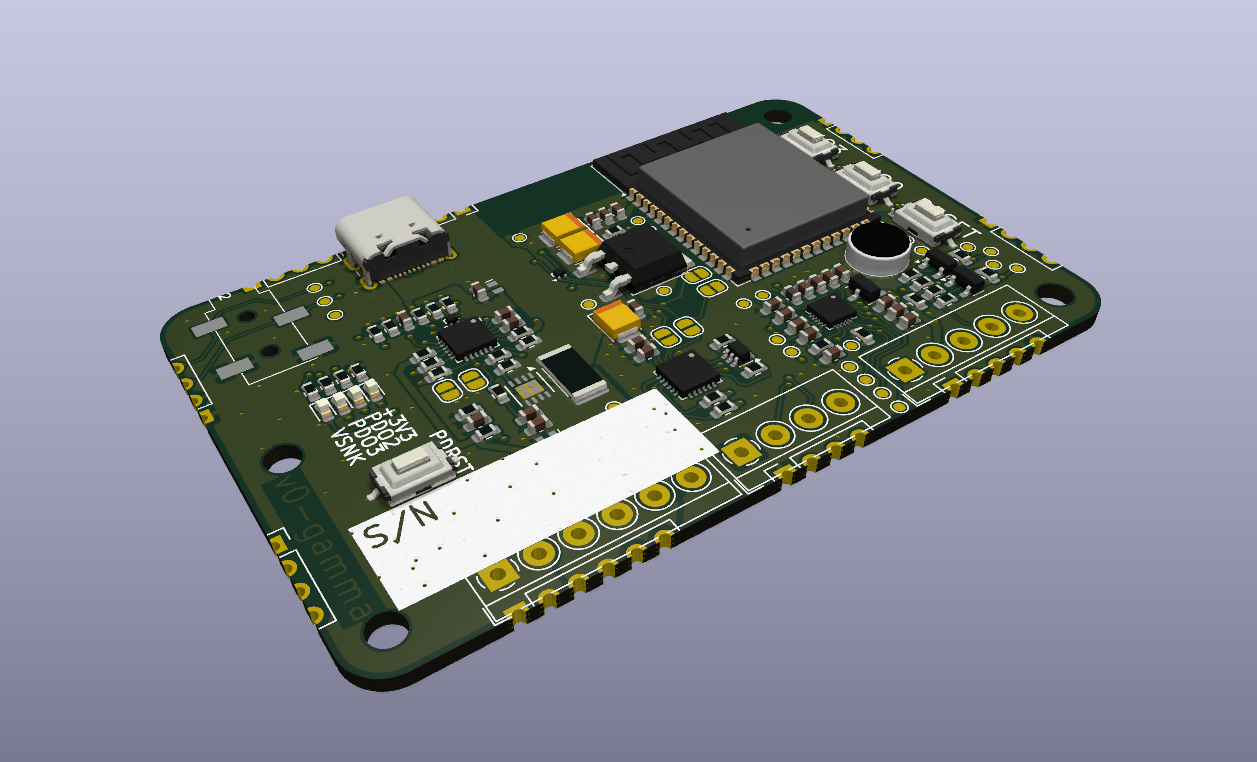

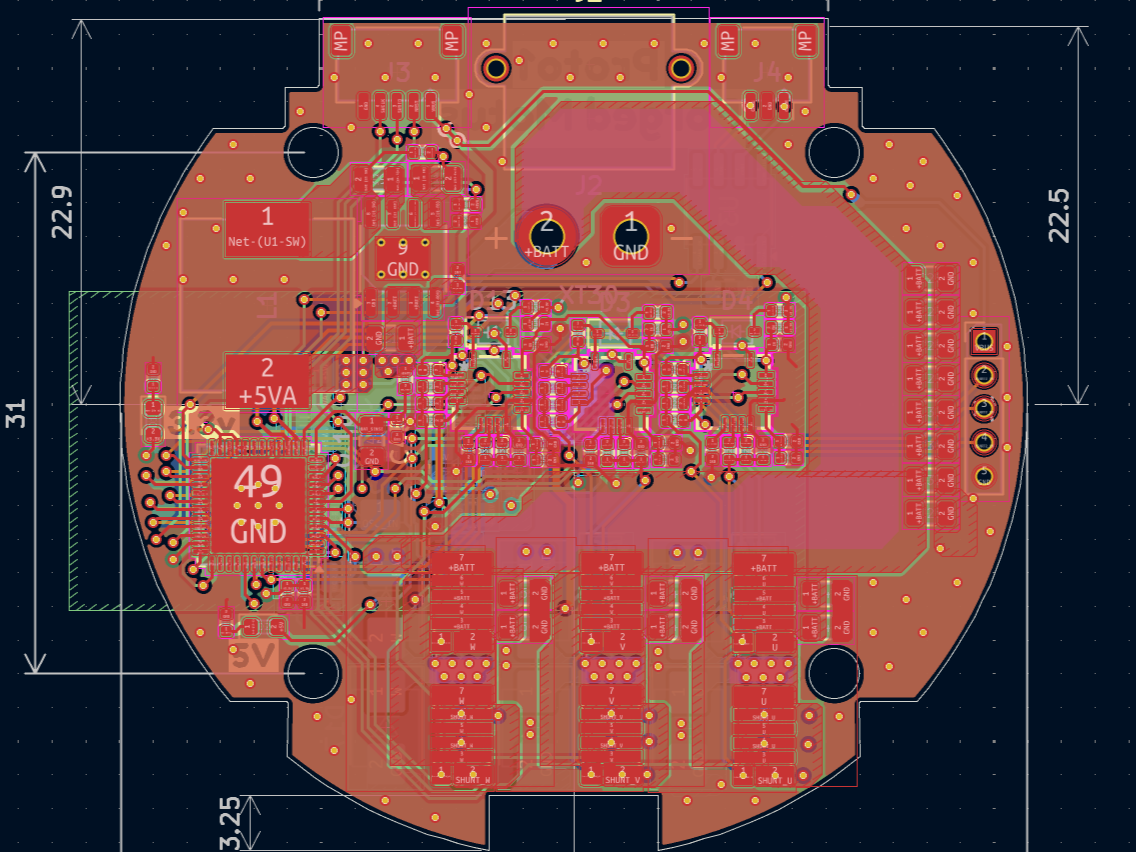
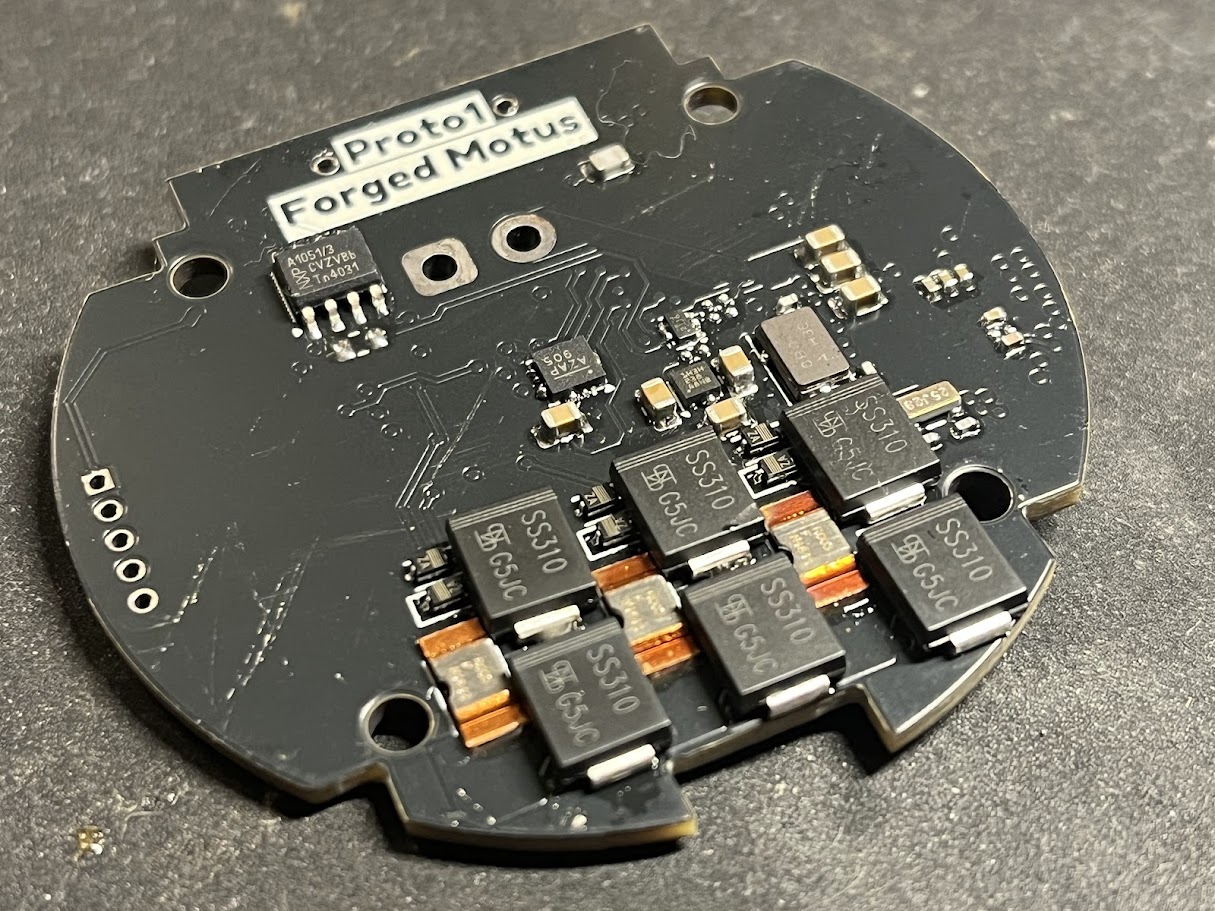
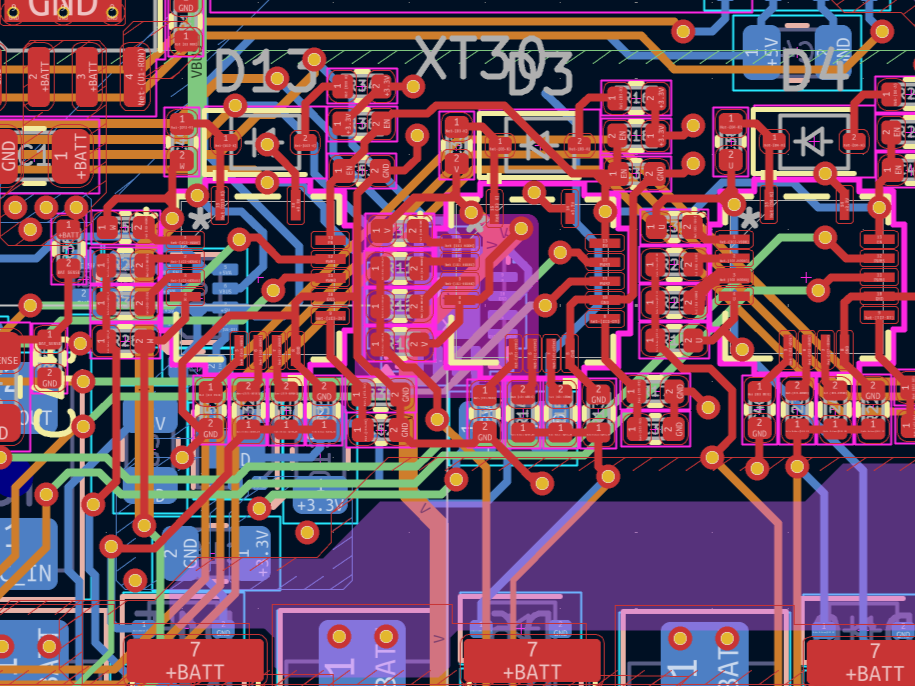
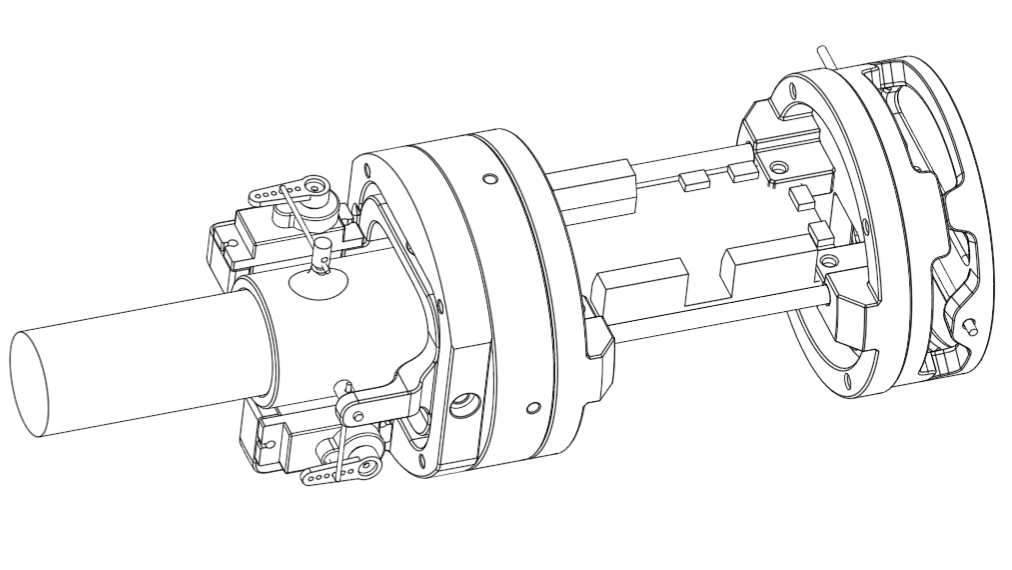
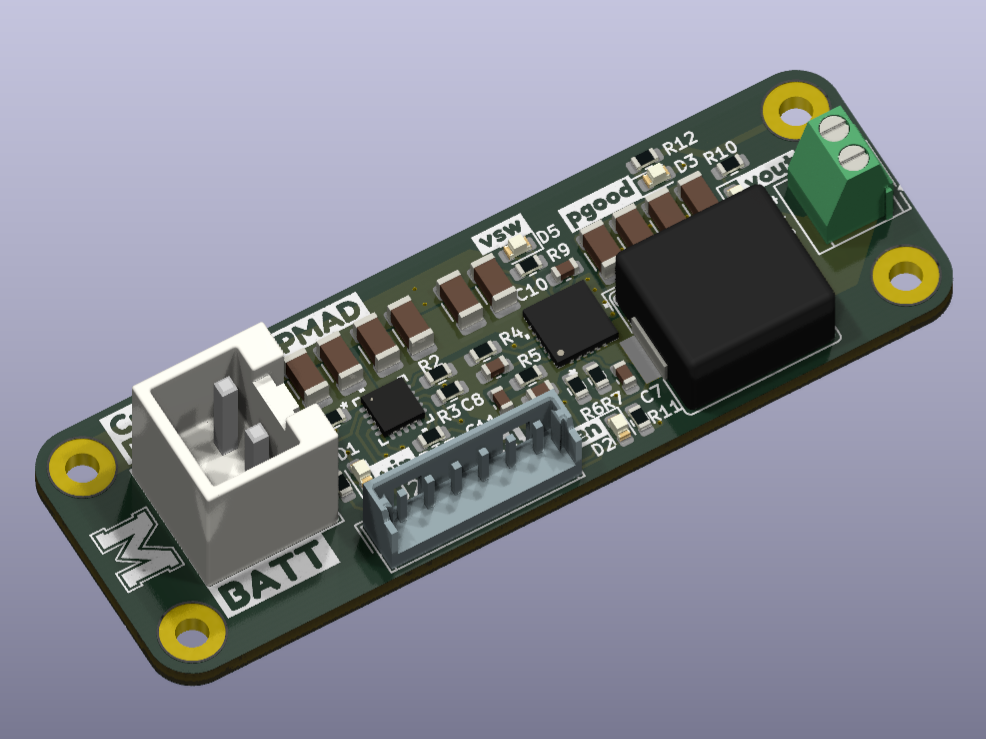
Starting in the spring of 2025, I joined Forged Motus as one of the first members and lead embedded systems engineer. My work has been focused primarily on PCB design as the company works through its initial hardware and electrical design of its first product, Proto One. I have been primarily responsible for the design and verification of our digital control circuitry, including a high performance STM32G series microcontroller and supporting circuitry. I also review all high power switching circuitry and have been the main designer of our PCB layouts. Currently I am testing and verifying our first prototype motor driver and developing preliminary software systems for high voltage responsive motor control in C/C++.